Walker Robot 🚶
Phase 1: Design and Calculations
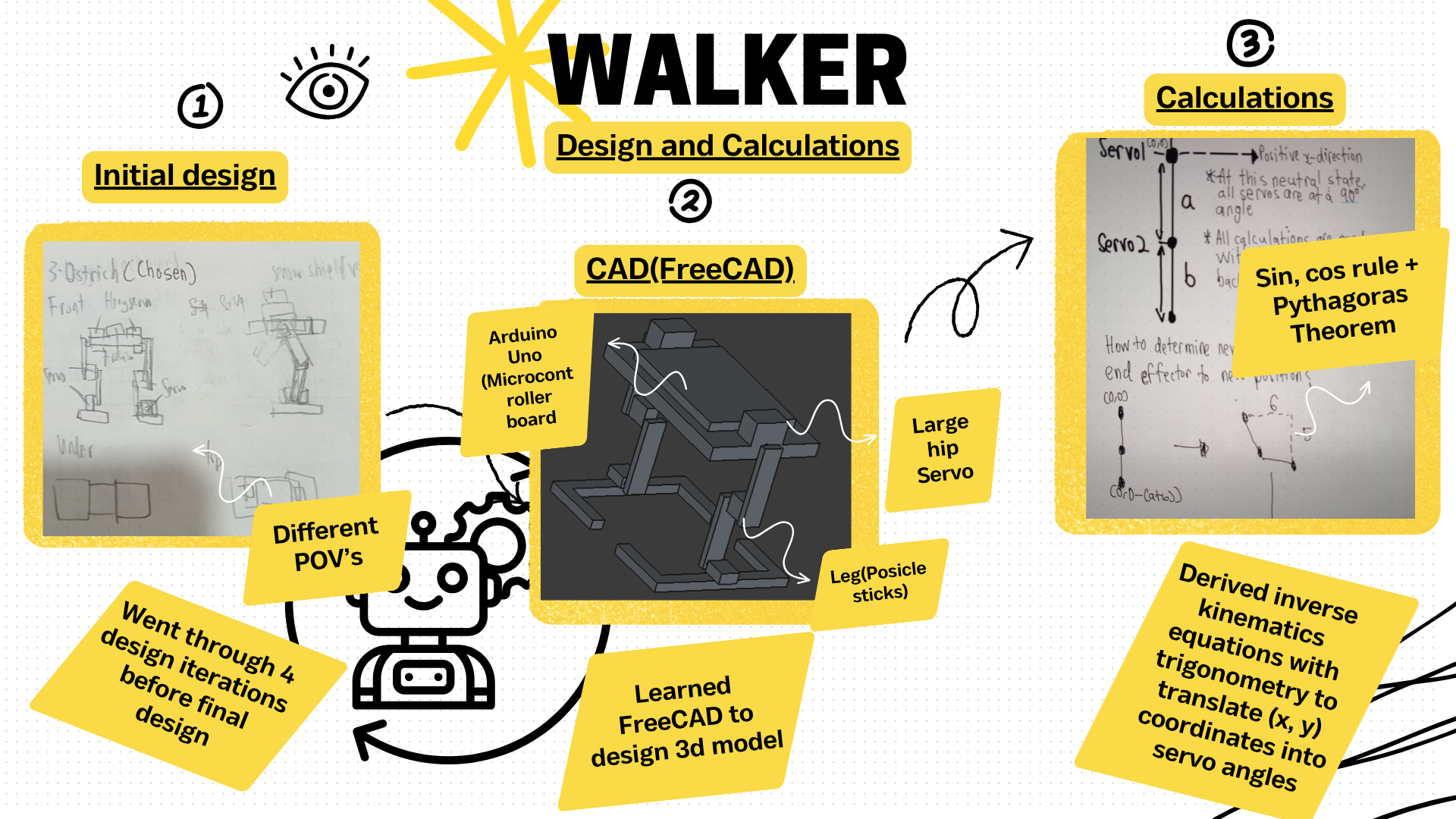
[!TIP] Do calculations on a device
Make several designs before committing to one
Phase 2: Programming, Testing and final
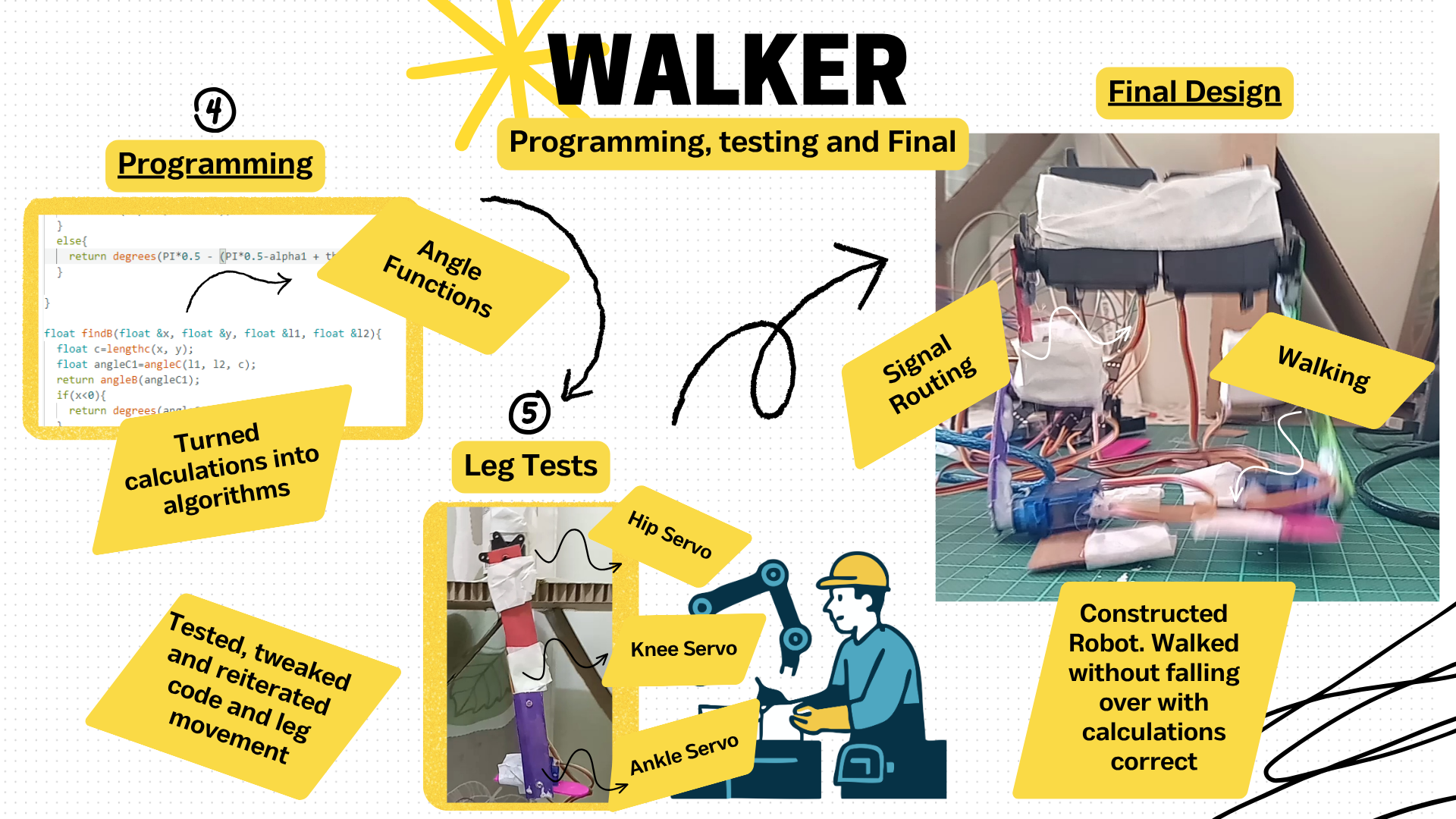
Video of Walker Walking
Previous Failures
At first, the robot always keeled over its own weight, but after altering the weight distribution of the robot, it was able to walk.
Like what you see? ❤️
Find out more by following this link to the full repo, containing the code and full explanation of the process